Давлетова Зульхиза Вафировна
Санкт-Петербург, 17 лет

Разработка и моделирование прототипа подводного планера
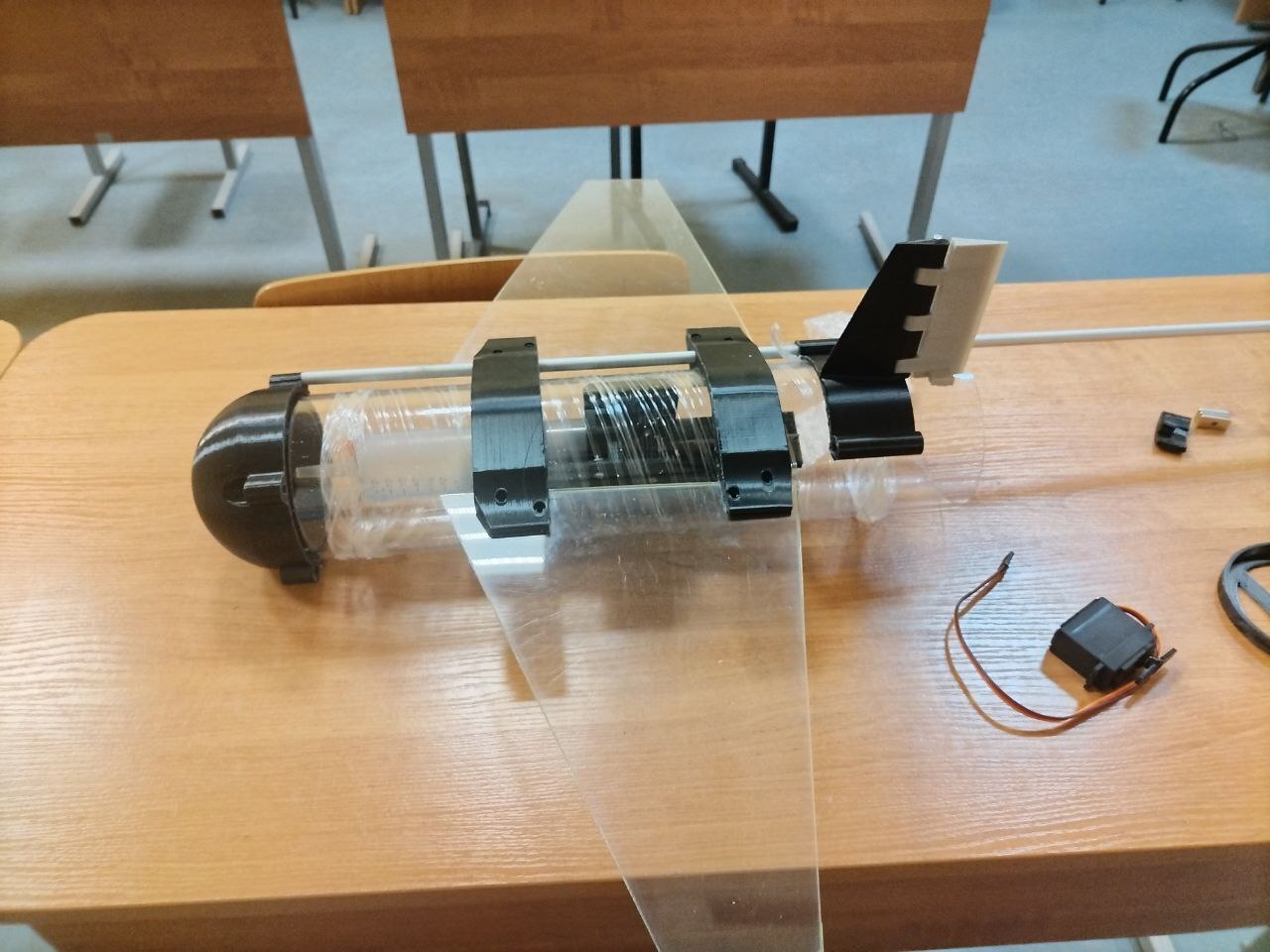
РЦель проекта — разработка и моделирование автономного необитаемого подводного аппарата, использующего принцип движения за счёт изменения плавучести. Это позволит осуществлять длительные исследовательские миссии в мировом океане. Готовый продукт — прототип подводного планера. Балластная система состоит из сосуда, поршня механиеский привод, который управляет поршнем. В аппарате роль сосуда с поршнем играет шприц. Привод представлен конструкцией из шестерёнок, зубчатой рейки и мотора.
Работу над этим проектом я начала еще в конце девятого класса. Мне хотелось найти по-настоящему интересную тему, в которую можно было бы погрузиться надолго, чтобы в будущем представлять свои результаты на конкурсах и выставках.
Еще в восьмом классе я увлеклась водной робототехникой, и в итоге это привело меня к идее создания подводного планера. Меня сразу заинтересовала эта тема, в отличие от обычных подводных роботов с «внешними» моторами и винтами, принцип движения планера был сосвмем другой. До этого я о них почти ничего не знала, поэтому с каждым днём я открывала для себя что-то новое, и это только подогревало мой интерес.
Еще в восьмом классе я увлеклась водной робототехникой, и в итоге это привело меня к идее создания подводного планера. Меня сразу заинтересовала эта тема, в отличие от обычных подводных роботов с «внешними» моторами и винтами, принцип движения планера был сосвмем другой. До этого я о них почти ничего не знала, поэтому с каждым днём я открывала для себя что-то новое, и это только подогревало мой интерес.