Суханов Артём Александрович
Ростовская область, 18 лет

Робот помощник с искусственным интеллектом
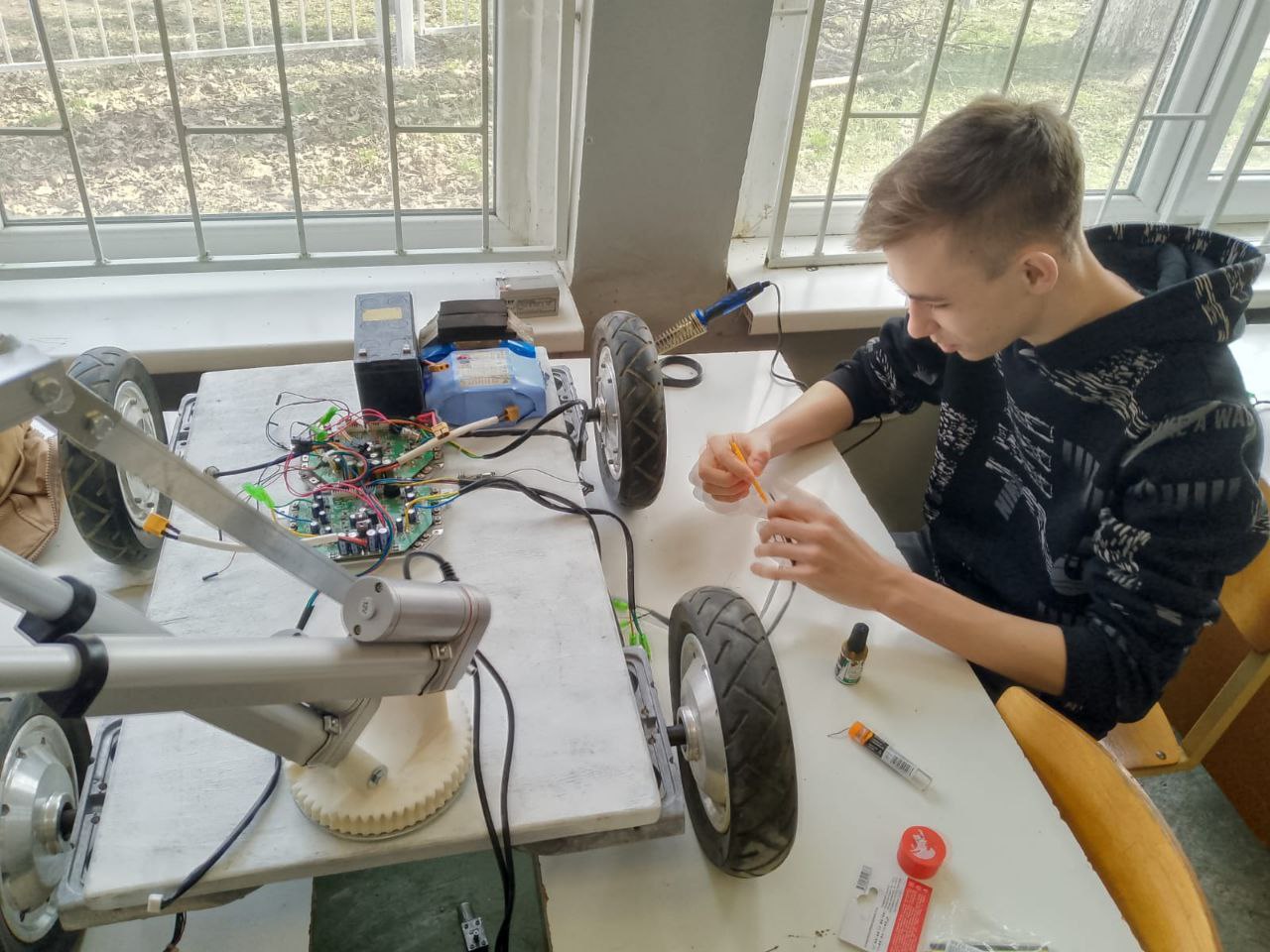
Ежедневно тысячи людей — от работников складов до пожилых людей —сталкиваются с необходимостью переносить тяжелые грузы вручную. Мое решение — автономный робот-помощник на базе Arduino.
Достигнутые результаты проекта:
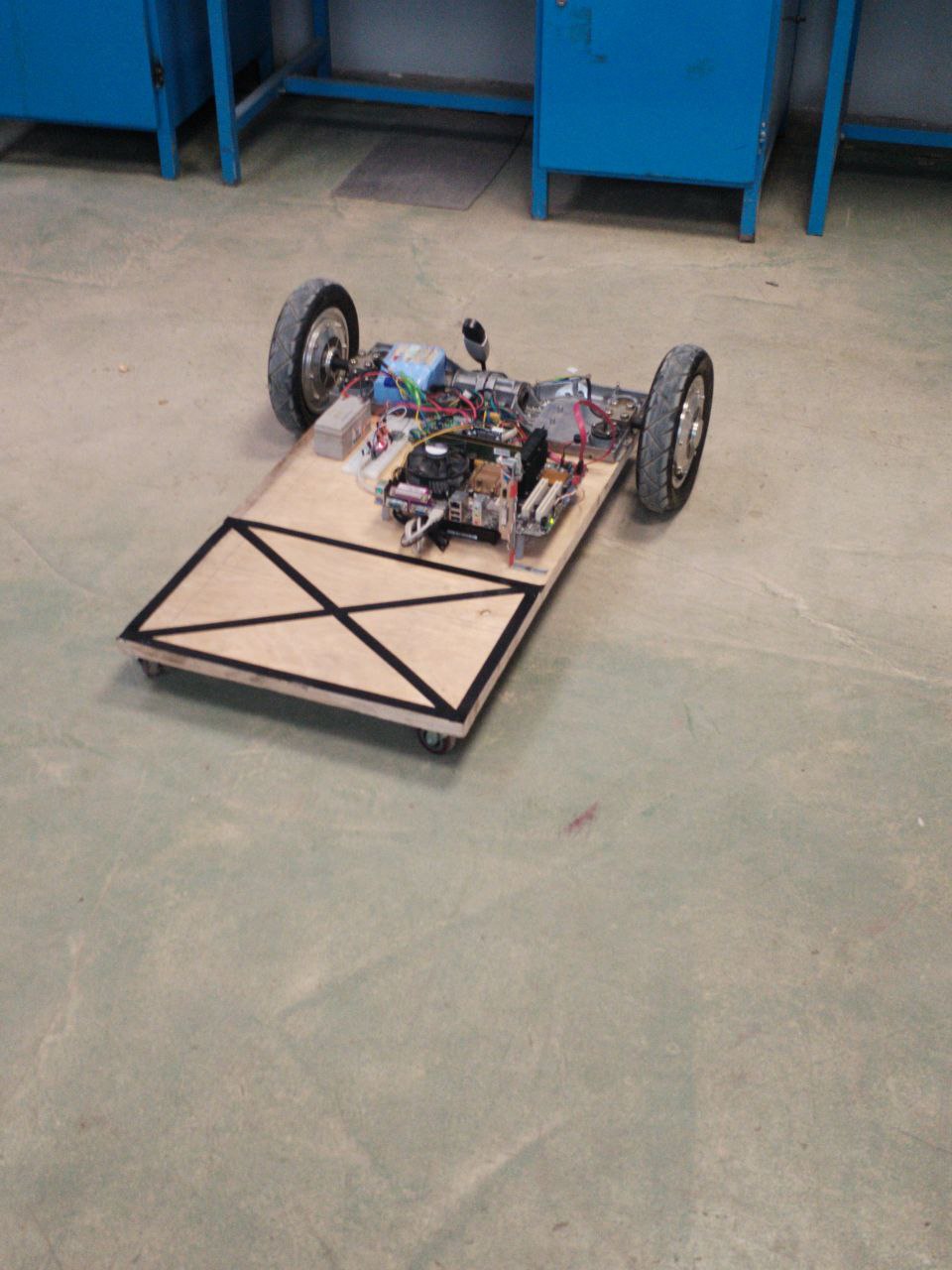
1. Создан функциональный прототип робота-помощника. Устойчивая двухколесная платформа с мощными двигателями постоянного тока. Грузоподъемность: до 150 кг. Автономная работа до 6 часов.
2. Система управления на основе компьютерного зрения.
Реализованная функция "Следование за оператором". Камера HD с частотой 30 кадров/с. Алгоритм распознавания силуэта человека в реальном времени. Поддержка работы в различных условиях. Точность распознавания: 92%.
3. Принцип работы.
Обнаружение человеческого силуэта. Определение дистанции до оператора (зона комфорта 1.5-3 метра). Плавное сопровождение без резких маневров. Автостоп при потере оператора из виду.
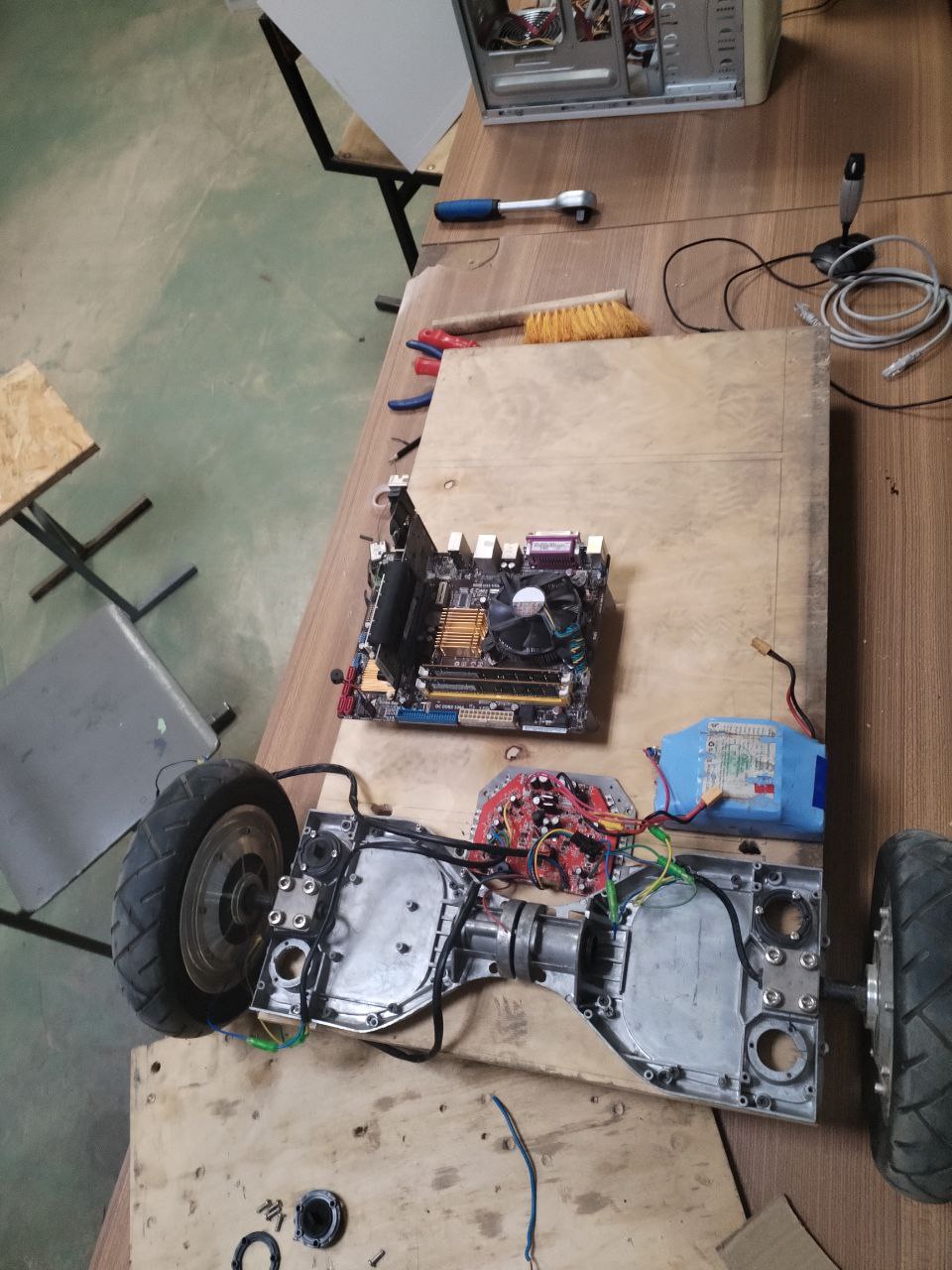
4. Программное обеспечение.
Прошивка для Arduino (двигатели, датчики, балансировка).
Python-скрипты для компьютерного зрения (OpenCV).
Достигнутые результаты проекта:
1. Создан функциональный прототип робота-помощника. Устойчивая двухколесная платформа с мощными двигателями постоянного тока. Грузоподъемность: до 150 кг. Автономная работа до 6 часов.
2. Система управления на основе компьютерного зрения.
Реализованная функция "Следование за оператором". Камера HD с частотой 30 кадров/с. Алгоритм распознавания силуэта человека в реальном времени. Поддержка работы в различных условиях. Точность распознавания: 92%.
3. Принцип работы.
Обнаружение человеческого силуэта. Определение дистанции до оператора (зона комфорта 1.5-3 метра). Плавное сопровождение без резких маневров. Автостоп при потере оператора из виду.
4. Программное обеспечение.
Прошивка для Arduino (двигатели, датчики, балансировка).
Python-скрипты для компьютерного зрения (OpenCV).
Идея возникла благодаря конкурсу «Техника Молодежи», который вдохновил на разработку робота, способного облегчить физический труд человека.
Основной интерес заключался в рассмотрении различных технологий, таких как компьютерное зрение на Python, использование плат от ПК, плат Arduino и гироскутера, создание автономной платформы. Этот ресурс не только решает практическую задачу, но и усовершенствует свои навыки программирования, проектирования и работы с искусственным интеллектом, преодолевая различные технические трудности и приобретая ценный опыт командной работы.
Основной интерес заключался в рассмотрении различных технологий, таких как компьютерное зрение на Python, использование плат от ПК, плат Arduino и гироскутера, создание автономной платформы. Этот ресурс не только решает практическую задачу, но и усовершенствует свои навыки программирования, проектирования и работы с искусственным интеллектом, преодолевая различные технические трудности и приобретая ценный опыт командной работы.